#include <hand.h>
Public Member Functions | |
| Hand () | |
| Empty constructor. More... | |
| void | initialize (igl::opengl::glfw::Viewer *viewer, Exoskeleton *exo_handler, AnimatedHand *anim_hand, bool type, const Eigen::Vector3d &origin) |
| Initialize the hand. More... | |
| void | update (const std::vector< Eigen::Vector3d > &euler_id, igl::opengl::glfw::Viewer &viewer) |
| It updates the hand vertices based on the euler angles for its skeleton joints. These are fed throught the AnimatedHand::EulerID struct. Based on the defined mapping it performs the forward kinematics for each finger and calcualtes all the hand vertices. More... | |
Private Member Functions | |
| template<typename T > | |
| std::vector< T > | concatenate_data (const std::vector< std::vector< T > > &data) |
| Concatenates vertex or face data to a std vector. More... | |
| Eigen::MatrixXd | translation_matrix (const Eigen::Vector3d &offset, size_t vert_num) |
| This function offset a set of vertices by a given offset. More... | |
Private Attributes | |
| std::string | m_config_rel_path = "share/hand_config.json" |
| std::filesystem::path | m_config_abs_path |
| Absolute name of hand's configuration file. More... | |
| std::vector< std::string > | m_hand_config = {"Thumb", "Index", "Middle"} |
| Hand configuration. More... | |
| std::vector< Finger > | m_fingers |
| Vector of finger handles. More... | |
| Eigen::Matrix3d | m_hand_rot |
| Eigen::Vector3d | m_hand_origin |
Hand origin with respect to the inertial frame of reference  . More... . More... | |
| std::vector< Eigen::MatrixXd > | m_vertex_data |
| Vertex data container. More... | |
| Eigen::MatrixXd | m_concatenated_hand_vertex_data |
| Concatenated hand vertex data. More... | |
| int | m_viewer_data_lower_idx |
| int | m_viewer_data_upper_idx |
| int | m_data_list_size |
Detailed Description
Class Hand.
This class defines the hand stucture. It calls the finger class (see Finger::) to compose the three fingers and develop the full kinematic model of the hand.
Constructor & Destructor Documentation
◆ Hand()
Member Function Documentation
◆ concatenate_data()
|
private |
Concatenates vertex or face data to a std vector.
This function is used to concatenate Eigen matrices. More specifically each link of the finger is imported as an Eigen::Matrix. The total finger is then a vector of Eigen matrices. The whole hand is a vector of fingers or a vector of a vector of links. This function takes this vector of vectors of links and converts to a vector of fingers.
- Template Parameters
-
T The type of Eigen::Matrix to concatenate (MatrixXd, MatrixXi etc).
- Parameters
-
data The vector of vectors of matrices.
- Returns
- std::vector<T> The vector of matrices.
Definition at line 108 of file hand.h.
◆ initialize()
| void Hand::initialize | ( | igl::opengl::glfw::Viewer * | viewer, |
| Exoskeleton * | exo_handler, | ||
| AnimatedHand * | anim_hand, | ||
| bool | type, | ||
| const Eigen::Vector3d & | origin | ||
| ) |
Initialize the hand.
The function first reads the hand configuration file (m_config_rel_path) and sets up all the its fingers.
- Parameters
-
viewer Pointer to the viewer object. exo_handler Point to the exoskeleton object. anim_hand Pointer to the hand animation object. type Defines whether the hand is the left one (0) or the right one (1). origin Defines the origin of the hand  with respct to the inertial frame .
with respct to the inertial frame .
Definition at line 15 of file hand.cpp.

◆ translation_matrix()
|
private |
This function offset a set of vertices by a given offset.
This is not a homogenous transformation matrix. Instead it is used for shifting a matrix of vertices (as defined by libigl) by a given offset.
- Parameters
-
offset The offset to shift the matrix of vertices. vert_num The number of matrices.
- Returns
- Eigen::MatrixXd The output translation matrix.
Definition at line 135 of file hand.cpp.

◆ update()
| void Hand::update | ( | const std::vector< Eigen::Vector3d > & | euler_id, |
| igl::opengl::glfw::Viewer & | viewer | ||
| ) |
It updates the hand vertices based on the euler angles for its skeleton joints. These are fed throught the AnimatedHand::EulerID struct. Based on the defined mapping it performs the forward kinematics for each finger and calcualtes all the hand vertices.
- Parameters
-
euler_id The custom EulerID structure as described in AnimatedHand::EulerID. viewer Pointer to the viewer object.
Definition at line 72 of file hand.cpp.


Member Data Documentation
◆ m_concatenated_hand_vertex_data
|
private |
◆ m_config_abs_path
|
private |
◆ m_config_rel_path
|
private |
Relative name of hand's configuration file. This is a json file that contains the geometric characteristics of each finger (link lengths of the finger, ordered as [proximal, middle, distal]), the position and orientation of the finger's frame with respect to the local hand frame  with
with 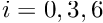 and the finger's frame names as illustrated in the figure below.
and the finger's frame names as illustrated in the figure below.
◆ m_data_list_size
|
private |
◆ m_fingers
|
private |
◆ m_hand_config
|
private |
◆ m_hand_origin
|
private |
◆ m_hand_rot
|
private |
 , with respect to the inertial frame of reference
, with respect to the inertial frame of reference ◆ m_vertex_data
|
private |
◆ m_viewer_data_lower_idx
|
private |
Viewer data lower and upper idx. The viewer object of libigl stores the vertex data into a container. This includes ALL the bodies that are rendered on the screen. For setting the vertices when they are updated it is important to know where the vertices for each object are located inside this container. These two variables define the lower and upper index for these specific instance of the hand. This way when we set the data for this hand to the viewer.data_list we know what vertices to update. For more info on how libigl handles multiple meshes at https://github.com/libigl/libigl/blob/main/tutorial/107_MultipleMeshes/main.cpp.
◆ m_viewer_data_upper_idx
The documentation for this class was generated from the following files: