Class KinematicAnimation. More...
#include <kinematic_animation.h>
Public Member Functions | |
| KinematicAnimation () | |
| Constructor. More... | |
| void | initialize (igl::opengl::glfw::Viewer *viewer, Exoskeleton *left_exo, AnimatedHand *anim_hand, MenuHandler *menu_handler) |
| Initialize animation. More... | |
| bool | animation_loop (igl::opengl::glfw::Viewer &viewer) |
| Animation loop callback. More... | |
Private Member Functions | |
| void | setup_exoskeletons (igl::opengl::glfw::Viewer &viewer) |
| Setup exoskeletons. More... | |
Private Attributes | |
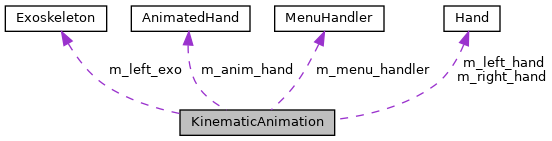
| Exoskeleton * | m_left_exo |
| Exoskeleton handler pointer. More... | |
| AnimatedHand * | m_anim_hand |
| Animated hand pointer. More... | |
| MenuHandler * | m_menu_handler |
| Menu handler pointer. More... | |
| Hand | m_left_hand |
| Left and right hand. More... | |
| Hand | m_right_hand |
| Eigen::Vector3d | m_left_origin = Eigen::Vector3d(0.0, 0.2, 0.0) |
| Left hand origin. More... | |
| Eigen::Vector3d | m_right_origin = Eigen::Vector3d(0.0, -0.2, 0.0) |
| Right hand origin. More... | |
| bool | m_initialize_animation = 1 |
| Bool start animation. More... | |
| Eigen::Matrix3d | m_camera_center |
| Camera matrix. More... | |
Detailed Description
Class KinematicAnimation.
This class implements the kinematic animation for the hand.
Definition at line 15 of file kinematic_animation.h.
Constructor & Destructor Documentation
◆ KinematicAnimation()
|
inline |
Member Function Documentation
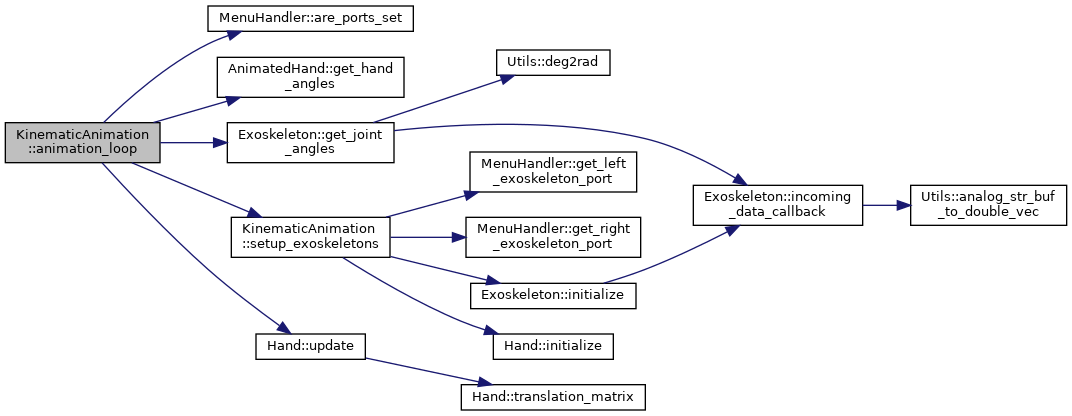
◆ animation_loop()
| bool KinematicAnimation::animation_loop | ( | igl::opengl::glfw::Viewer & | viewer | ) |
Animation loop callback.
This is the main animation callback function. This is where the rendering is happening. The function is passed as a lambda function to the Viewer handler (see main.cpp).
- Parameters
-
viewer Reference to the viewer handle.
- Returns
- true Animation should stop.
- false Animations keeps playing.
Definition at line 36 of file kinematic_animation.cpp.

◆ initialize()
| void KinematicAnimation::initialize | ( | igl::opengl::glfw::Viewer * | viewer, |
| Exoskeleton * | left_exo, | ||
| AnimatedHand * | anim_hand, | ||
| MenuHandler * | menu_handler | ||
| ) |
Initialize animation.
Initializes kinematics animation by copying the input arguments to the member variables.
- Parameters
-
viewer Pointer to the igl Viewer object. left_exo Pointer to the left exoskeleton object. anim_hand Pointer to the animated hand object. menu_handler Pointer to menu handler object.
Definition at line 11 of file kinematic_animation.cpp.

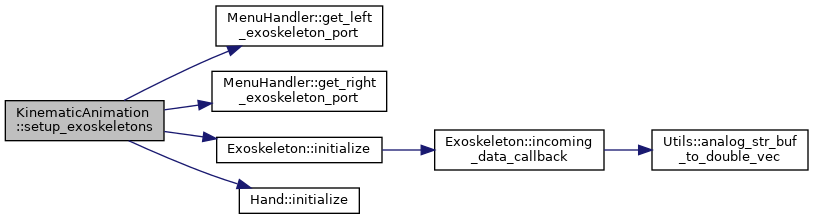
◆ setup_exoskeletons()
|
private |
Setup exoskeletons.
This function setups the exoskeletons. It initializes the serial communications, the exoskeleton and the hand objects.
- Parameters
-
viewer A reference to the viewer handle.
Definition at line 73 of file kinematic_animation.cpp.

Member Data Documentation
◆ m_anim_hand
|
private |
Animated hand pointer.
Definition at line 36 of file kinematic_animation.h.
◆ m_camera_center
|
private |
Camera matrix.
Definition at line 57 of file kinematic_animation.h.
◆ m_initialize_animation
|
private |
Bool start animation.
Definition at line 51 of file kinematic_animation.h.
◆ m_left_exo
|
private |
Exoskeleton handler pointer.
Definition at line 33 of file kinematic_animation.h.
◆ m_left_hand
|
private |
Left and right hand.
Definition at line 42 of file kinematic_animation.h.
◆ m_left_origin
|
private |
Left hand origin.
Definition at line 45 of file kinematic_animation.h.
◆ m_menu_handler
|
private |
Menu handler pointer.
Definition at line 39 of file kinematic_animation.h.
◆ m_right_hand
|
private |
Definition at line 42 of file kinematic_animation.h.
◆ m_right_origin
|
private |
Right hand origin.
Definition at line 48 of file kinematic_animation.h.
The documentation for this class was generated from the following files:
- include/kinematic_animation.h
- src/kinematic_animation.cpp