This class runs the client that handles the vertices coming from the python server face_mesh_server.py to render the face landmarking. More...
#include <face.h>
Public Member Functions | |
| Face () | |
| Constructor. More... | |
| void | update (void) |
| Eigen::MatrixXd | get_vertices (void) |
| Get face vertices. More... | |
| Eigen::MatrixXi | get_surface_indices (void) |
| Get the surface indices of the face mesh. More... | |
| Eigen::MatrixXd | translation_matrix (const Eigen::Vector3d &offset, size_t vert_num) |
| This function offset a set of vertices by a given offset. More... | |
Private Member Functions | |
| void | setup_tcp_communication (void) |
| Setup communication with python server. More... | |
| Eigen::MatrixXd | incoming_data_callback (void) |
| Read incoming data. More... | |
Private Attributes | |
| std::filesystem::path | m_vertices_connections_abs_path |
| Absolute name of vertices connection files. More... | |
| std::string | m_vertices_connections_rel_filename |
| Relative name of vertices connection files. More... | |
| Eigen::MatrixXi | m_faces |
| Face landmarking indices matrix. More... | |
| std::string | m_local_ip_address = "127.0.1.1" |
| Start tcp client at this ip adress (localhost). More... | |
| const int | m_tcp_port = 5052 |
| int | m_socket = 0 |
| Socket handle. More... | |
| const int | m_buffer_size = 40000 |
| const int | m_vertices_num = 468 |
| Number of vertices provided by the mediapipe. This is constant. More... | |
| Eigen::MatrixXi | m_surf_indices |
| The surface element indices of the incoming mesh. More... | |
| std::future< Eigen::MatrixXd > | m_future_fun |
| Future function handle. More... | |
| bool | m_return_value = 0 |
| Termination flag for callback function. More... | |
| Eigen::MatrixXd | m_vol_mesh_vertices |
| Volume mesh data. More... | |
| Eigen::Matrix3d | m_rot_mat = Eigen::Matrix3d::Identity() |
| Face rotation matrix. More... | |
| double | m_face_mesh_scale = 6.0 |
| Face scale matrix. More... | |
| Eigen::Vector3d | m_face_offset = Eigen::Vector3d({0.0, -2.0, 0.0}) |
| Eigen::Matrix3d | m_scale_mat |
Detailed Description
This class runs the client that handles the vertices coming from the python server face_mesh_server.py to render the face landmarking.
Constructor & Destructor Documentation
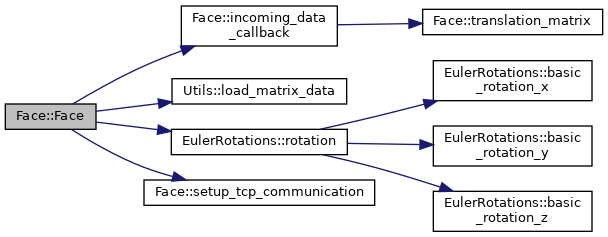
◆ Face()
| Face::Face | ( | ) |
Constructor.
Construct a new Face:: Face object It initializes the tcp communcations and the asychronous functionalities. The indices of the face mesh are stored in the "vertices_connections.csv" and they are converted to an Eigen::MatrixXi.
Definition at line 9 of file face.cpp.
Member Function Documentation
◆ get_surface_indices()
|
inline |
◆ get_vertices()
| Eigen::MatrixXd Face::get_vertices | ( | void | ) |
Get face vertices.
It is the point of entry that feeds the animation loop with the face vertices data. It also manages the asynchronous threading.
- Returns
- Eigen::MatrixXd The face vertices.
Definition at line 41 of file face.cpp.

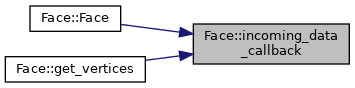
◆ incoming_data_callback()
|
private |
Read incoming data.
This is the callback function for reading asynchronously the incoming data (vertices) from the server. The data is sent as a json file, so a parser is also used for reading the x, y and z coordinates of each vertex of the face mesh.
- Returns
- Eigen::MatrixXd The vertex pointcloud
Definition at line 63 of file face.cpp.

◆ setup_tcp_communication()
|
private |
Setup communication with python server.
Since the libraries for face landmarking are all written in Python, we establish an Inter-process communication (IPC), to get all the data in our C++ program. In this case the IPC is implemented with the help of sockets. The python side sets up a server and it transmits all the data to our C++ client. This method sets the tcp communication and initializes the socket and the client that listens to incoming data.
Definition at line 143 of file face.cpp.

◆ translation_matrix()
| Eigen::MatrixXd Face::translation_matrix | ( | const Eigen::Vector3d & | offset, |
| size_t | vert_num | ||
| ) |
This function offset a set of vertices by a given offset.
This is not a homogenous transformation matrix. Instead it is used for shifting a matrix of vertices (as defined by libigl) by a given offset.
- Parameters
-
offset The offset to shift the matrix of vertices. vert_num The number of matrices.
- Returns
- Eigen::MatrixXd The output translation matrix.
Definition at line 176 of file face.cpp.

◆ update()
| void Face::update | ( | void | ) |
Member Data Documentation
◆ m_buffer_size
|
private |
◆ m_face_mesh_scale
|
private |
◆ m_face_offset
|
private |
◆ m_faces
|
private |
◆ m_future_fun
|
private |
◆ m_local_ip_address
|
private |
◆ m_return_value
|
private |
◆ m_rot_mat
|
private |
◆ m_scale_mat
|
private |
◆ m_socket
◆ m_surf_indices
|
private |
◆ m_tcp_port
|
private |
◆ m_vertices_connections_abs_path
|
private |
◆ m_vertices_connections_rel_filename
|
private |
◆ m_vertices_num
|
private |
◆ m_vol_mesh_vertices
|
private |
The documentation for this class was generated from the following files: